本文共 4235 字,大约阅读时间需要 14 分钟。
一、什么是按需加载
和异步加载script的目的一样(),按需加载/代码切割也可以解决首屏加载的速度。
- 什么时候需要按需加载
如果是大文件,使用按需加载就十分合适。比如一个近1M的全国城市省市县的json文件,在我首屏加载的时候并不需要引入,而是当用户点击选项的时候才加载。如果不点击,则不会加载。就可以缩短首屏http请求的数量以及时间。
如果是小文件,可以不必太在意按需加载。过多的http请求会导致性能问题。
二、实现按需加载的方法
- Webpack打包模块工具实现
- RequireJs实现
这里介绍React-router+Webpack实现按需加载的功能,效果如下:
三、实现过程(React-router4.0)
注意!我这里使用的是最新版本的React-router-dom^4.3.1.如果是4.0以下的react-route可直接看四
4.0相比以前实现方式要复杂。需要引入bundle-loader模块。并且自己创建bundle模型实现。
1.创建包装组件模型bundle.js
import React from 'react';class Bundle extends React.Component { constructor(arg){ super(arg) this.state = { mod: null, } } componentWillMount() { this.load(this.props); } componentWillReceiveProps(nextProps) { if (nextProps.load !== this.props.load) { this.load(nextProps); } } // load 方法,用于更新 mod 状态 load(props) { // 初始化 this.setState({ mod: null }); /* 调用传入的 load 方法,并传入一个回调函数 这个回调函数接收 在 load 方法内部异步获取到的组件,并将其更新为 mod */ props.load(mod => { this.setState({ mod: mod.default ? mod.default : mod }); }); } render() { /* 将存在状态中的 mod 组件作为参数传递给当前包装组件的'子' */ return this.state.mod ? this.props.children(this.state.mod) : null; }}export default Bundle ; 2.创建包装组件的方法(函数)
// 懒加载方法import React from 'react';import Bundle from './Bundle';console.log(Bundle);// 默认加载组件,可以直接返回 nullconst Loading = () =>Loading...;/* 包装方法,第一次调用后会返回一个组件(函数式组件) 由于要将其作为路由下的组件,所以需要将 props 传入*/const lazyLoad = loadComponent => props => ({Comp => (Comp ? );console.log(lazyLoad);export default lazyLoad; //实际上lazyLoad就是一个函数,组件调用即可: )}
上面两个文件的关系: lazyLoad.js从名字上看,叫懒加载.实际上是一个中间件的作用。最后lazyLoad会暴露一个函数出来供组件调用。lazyLoad导出的内容:
function lazyLoad(loadComponent) { return function(props) { return ( {Comp => (Comp ? ) }} 显而易见,loadComponent就是要加载的组件,在路由中调用,例如:异步调用page1组件
Bundle.js作为按需加载的核心,在lazyLoad中间件就已经引入,并传入一个自定义的方法load,值为组件内容。以及动态的子内容children:
{Comp => (Comp ? 最终返回组件信息,并附带相应的props.如果不存在相关组件,则Loading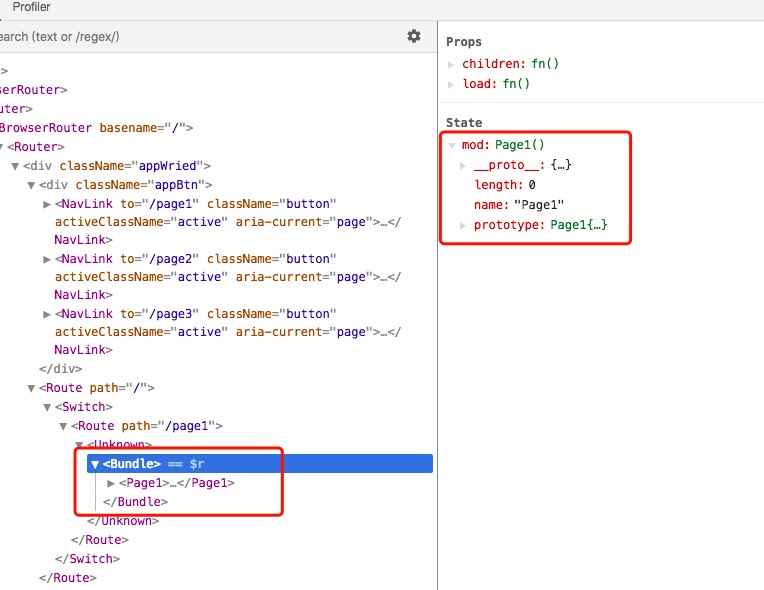
3. Route搭配使用
import React from 'react';import { NavLink,Route,Switch,BrowserRouter as Router } from 'react-router-dom'import './style/style.css'import 'bundle-loader'// bundle模型用来异步加载组件import Bundle from '../routes/Bundle.js';import lazyLoad from '../routes/lazyLoad';import Page1 from 'bundle-loader?lazy&name=page1!../components/page1/index';import Page2 from 'bundle-loader?lazy&name=page2!../components/page2/index';import Page3 from 'bundle-loader?lazy&name=page3!../components/page3/index';class AppPage extends React.Component{ constructor(arg){ super(arg) this.state={} } render(){ return( PAGE1 PAGE2 PAGE3 ( )} /> ) }}export default AppPage; - 几个注意的点:
- import异步加载组件的时候,名字变更为'bundle-loader?lazy&name=page1!../components/page1/index'
其中bundle-loader表示loader:'bunle-loader'(需加载bundle-loader模块)
lazy表示lazy:true;懒加载 name:表示异步生成的文件名字- 去掉外层route,不用render渲染也是可行的
//webpack.config.js... module.exports = { ... output:{ path:path.join(__dirname + '/dist'), //打包地方 filename:'bundle.js', //打包名字 publicPath: '/', //自动生成html引入js的路径 //按需加载 chunkFilename:'[name]_[chunkhash:8].js' }, ... }... 这里要注意一下publicPath这个参数. 如果未设置publicPath参数,则默认打包生成的html引入bundle的时候为:
如果设置publicPath为publicPath: '/dist',则打包后html文件引入js格式为:
参考文章:
转载